
New Project, New Challenges
Published:
 After 6 years of working in the AI research group, I have taken up a research fellow postdoc position in the real-time and distributed systems group, specifically working on the SCHEME project (safety-critical harsh environment micro-processor evolution). I am applying many of the techniques from previous work such as feature engineering, algorithm selection, constraint programming in order to solve problems in robotics system.
After 6 years of working in the AI research group, I have taken up a research fellow postdoc position in the real-time and distributed systems group, specifically working on the SCHEME project (safety-critical harsh environment micro-processor evolution). I am applying many of the techniques from previous work such as feature engineering, algorithm selection, constraint programming in order to solve problems in robotics system.
The first paper on this new research area (for me) was accepted to the TAROS 2026 conference. The work addresses the issue of a robot carrying out a collection of tasks, with the possibility of using different motion planners for each sub-task; the focus is on predictability of performance and in particular the reliability of the combined solution in terms of meeeting deadlines.
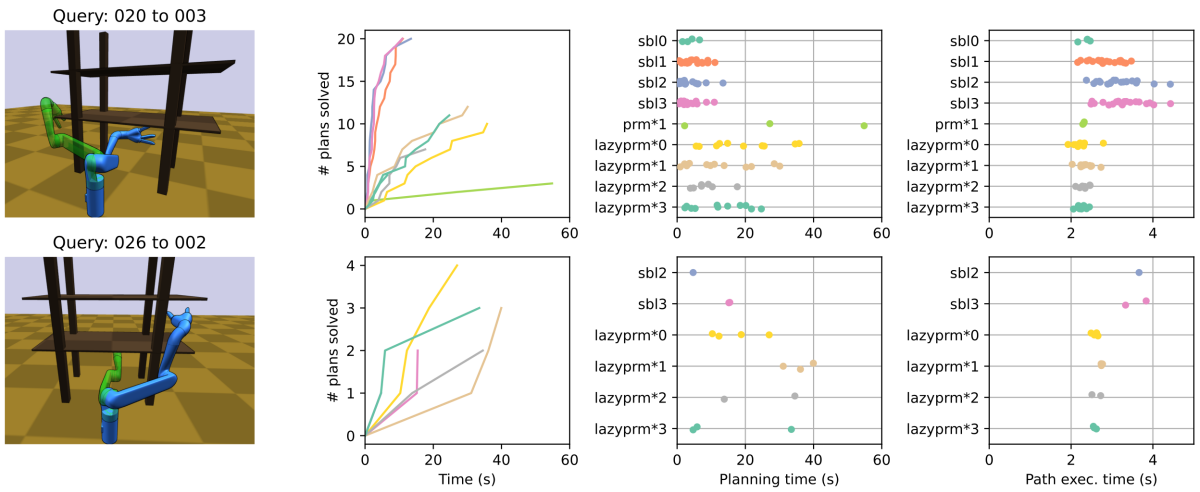 Figure: Different algorithms perform better on different tasks
Figure: Different algorithms perform better on different tasks
Planning algorithms show complementarity of performance across a range of tasks; by training a machine learning model to select an algorithm according to the features of a new task, we are able to show that the overall performance of the global task is more predictable, with a much shorter right tail in our evaluation simulations.
 In the summer of 2025, the maths department moved in alongside computer science into the Ian Wand building. The table tennis table in our courtyard stood mostly unused, as did the table-football in the communal pod. I organised a table sports tournament to encourage people from both departments to have some fun getting to know each other over a game.
In the summer of 2025, the maths department moved in alongside computer science into the Ian Wand building. The table tennis table in our courtyard stood mostly unused, as did the table-football in the communal pod. I organised a table sports tournament to encourage people from both departments to have some fun getting to know each other over a game. ModRef has been an excellent venue for presenting cutting edge research, at the work in progress stage for researchers interested in constraint programming. As a PhD student, I found it a valuable stepping stone, enabling me to polish and improve my work before submitting it for publication.
ModRef has been an excellent venue for presenting cutting edge research, at the work in progress stage for researchers interested in constraint programming. As a PhD student, I found it a valuable stepping stone, enabling me to polish and improve my work before submitting it for publication. Glasgow, here we come! It was very exciting to be a co-author on two papers accepted to CP2025 in Glasgow. One paper presents a constraint model used by the
Glasgow, here we come! It was very exciting to be a co-author on two papers accepted to CP2025 in Glasgow. One paper presents a constraint model used by the  I’ve enjoyed solving the
I’ve enjoyed solving the